公司物联网团队由黄宝琦教授、贾冰副教授、郝利飞研究员等教师和50余名研究生组成。团队入选自治区高等学校创新团队发展计划,专注于物联网智能感知、无线网络定位、生态大数据等领域的研究和应用。近期,物联网团队在无人机、机器人等多智能体协同智能感知方向取得了重要研究进展,3项研究成果发表在领域顶级期刊上。以下为成果简述:
1.在多智能体多模态融合感知方面,在中国计算机协会(CCF)推荐A类期刊IEEE Transactions on Mobile Computing上发表了题为“Heterogeneous Dual-Attentional Network for WiFi and Video-Fused Multi-modal Crowd Counting”的学术论文(论文链接:https://ieeexplore.ieee.org/document/10637758)。
为克服无线或视觉感知智能体捕获单模态信息存在的固有局限,如无线信号的随机性和稀疏性、视觉信号的视野局部性和易受干扰性,课题组提出一种创新的基于多模态深度学习的异构双注意力网络(HDANet)模型,利用大量的WiFi嗅探器和少量的摄像头构建多智能体多模态感知网络,通过联合建模全局无线感知与少量局部视频感知的模态内和模态间相关性,实现了精准和稳定的大范围人群分析,并在覆盖面积超1万平米的真实校园环境中验证了其优越的人群分析准确性和稳定性。
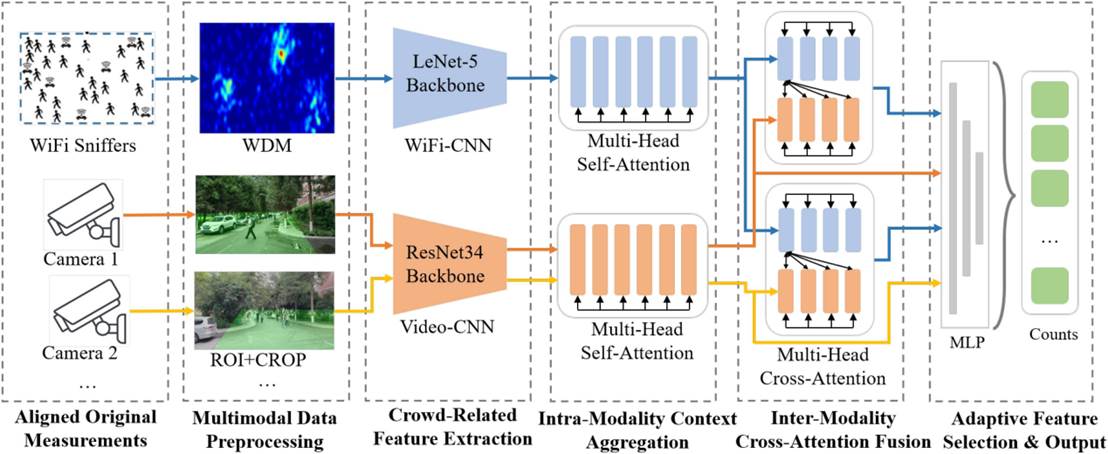
图1 异构双注意力网络模型(HDANet)整体流程图
该成果由公司与西安电子科技大学毛国强教授课题组合作完成。黄宝琦教授为通讯作者,郝利飞研究员为第一作者,贾冰副教授为第三作者,太阳成集团tyc33455cc为第一完成单位。该研究受到国家自然科学基金、自治区自然科学基金、自治区高等学校创新团队发展计划等项目支持。
2.在多无人机协同感知方面,在CCF推荐A类期刊IEEE Transactions on Mobile Computing上发表题为“Energy-Efficient 3-D UAV Ground Node Accessing Using the Minimum Number of UAVs”(论文链接:https://ieeexplore.ieee.org/document/10539333)。
多无人机协同感知已广泛应用于数据收集、环境监测等领域,如何减少特定任务执行时的无人机数量和能耗是其中的关键问题。现有研究多集中于二维场景、假设无人机数量固定且场景特定,导致通用性不足。对于三维场景下多无人机访问多个地面节点的任务,课题组将其建模为最少数量智能体高能效多目标访问问题,并进一步分解为两个子问题:(1)利用凸优化和路径离散化技术使单个无人机连续访问任意两个目标节点的能耗最小;(2)利用基于改进粒子群优化和贪心路径分配的近似框架(MPSO-GPA)实现最少数量无人机情况下的高能效路径规划。
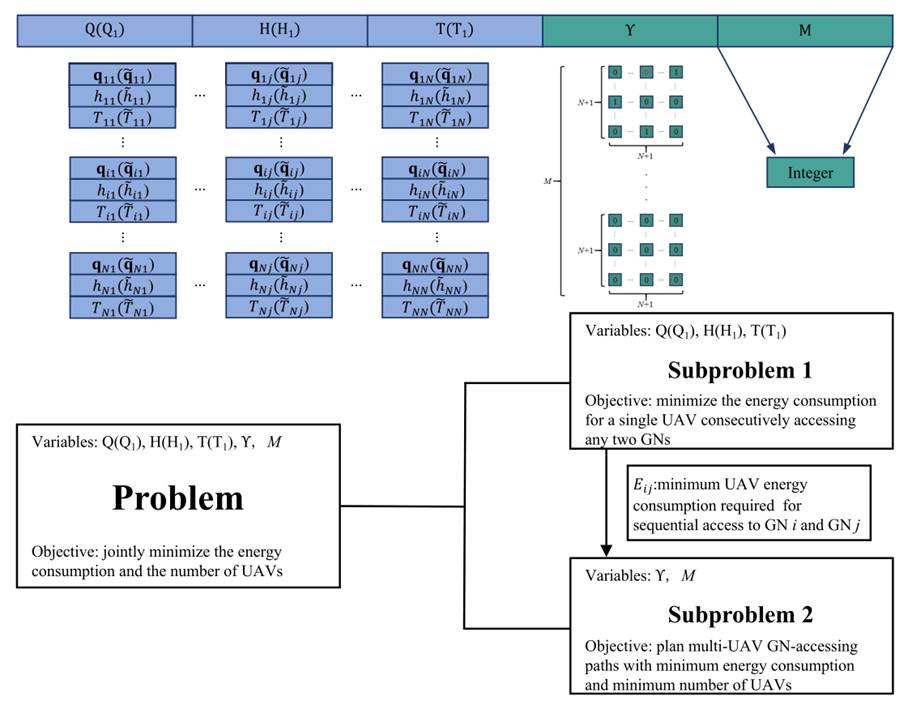
图2 最少数量智能体高能效多目标访问的优化问题及决策变量示意图
该成果由公司独立完成。黄宝琦教授为通讯作者,所指导的2020级博士研究生弓浩为第一作者,贾冰副教授为第三作者,太阳成集团tyc33455cc为第一完成单位。该研究受到国家自然科学基金、自治区自然科学基金、自治区高等学校创新团队发展计划等项目支持。
(3)在机器人视觉感知优化方面,在中科院SCI一区TOP期刊IEEE Transactions on Intelligent Transportation Systems上发表题为“MAS-DSO: Advancing Direct Sparse Odometry With Multi-Attention Saliency”的学术论文(论文链接:https://ieeexplore.ieee.org/document/10570369)。
视觉里程计(Visual Odometry, VO)是同时定位与建图(Simultaneous Localization And Mapping, SLAM)的重要分支,已被广泛应用于无人机、机器人导航等领域。然而,由于现有视觉里程计的特征选择能力有限、图像结构理解能力不足,导致其在动态纹理、光照不足和快速旋转运动等复杂环境中的表现较差。为此,课题组提出一种新型视觉里程计框架,即多注意力显著性直接稀疏里程计(MAS-DSO),通过对视觉显著区域的精准识别和图像结构的深入理解,显著增强了视觉里程计的性能和鲁棒性。同时,提出的MAS-DSO还能够提高特征选择效率和增强复杂环境中多元化图像的处理能力。
图3 多注意力显著性直接稀疏里程计(MAS-DSO)架构图
该成果由公司独立完成。黄宝琦教授为通讯作者,所指导的2021级博士研究生李祥宇为第一作者,贾冰副教授为第三作者,太阳成集团tyc33455cc为第一完成单位。该研究受到国家自然科学基金、自治区科技计划、自治区高等学校创新团队发展计划等项目支持。

